रोबोटिक मिग वेल्डिंग ---- स्ट्रीट लैंप पोल वेल्डिंग समाधान
अनुक्रमणिका
1. कार्य टुकड़ा जानकारी
2. रोबोटिक वेल्डिंग समाधान अवलोकन
3. रोबोटिक वेल्डिंग समाधान प्रक्रिया
4. रोबोटिक समाधान उपकरण विन्यास
5. मुख्य कार्य 6. उपकरणों का परिचय
7. स्थापना, कमीशनिंग और प्रशिक्षण
8. जाँच और स्वीकृति
9. पर्यावरण आवश्यकताएँ
10. वारंटी और बिक्री के बाद सेवा
11. डिलिवरी संलग्न दस्तावेज
रोबोटिक वेल्डिंग एप्लीकेशन वीडियो
1, वर्कपीस सूचना
-वेल्डिंग तार व्यास: Ф1.2 मिमी
-वेल्डिंग की प्रक्रिया: गैस परिरक्षित वेल्डिंग/मिग वेल्डिंग
-वेल्ड सीम प्रकार: सीधी रेखा का प्रकार, वृत्त का प्रकार
-सुरक्षा करने वाली गैस:99% CO2
-प्रचालन की विधि: मैनुअल लोडिंग और अनलोडिंग, रोबोट स्वचालित वेल्डिंग
-फिटिंग अप त्रुटि:≤ 0.5 मिमी
-प्लेट की सफाई :वेल्ड में धात्विक चमक देखी जा सकती है औरदोनों तरफ वेल्ड सीम की दोगुने ऊंचाई की सीमा के भीतर
2, रोबोटिक वेल्डिंग समाधान अवलोकन
कार्य कुशलता में सुधार करने के लिए, वर्कपीस की वास्तविक स्थिति के अनुसार, होनेन फैक्ट्री वेल्डिंग रोबोट वर्कस्टेशन का एक सेट प्रदान करेगी, जिसे विभिन्न उत्पादों के साथ संगत होने के लिए अलग-अलग टूलींग से बदला जा सकता है।वर्कस्टेशन रोबोट मॉडल से बना है: HY1006A-145 वेल्डिंग रोबोट, वेल्डिंग पावर स्रोत, रोबोट के लिए विशेष वेल्डिंग मशाल, विद्युत नियंत्रण कैबिनेट और बटन, वाटर कूलिंग चिलर, डबल वर्किंग स्टेशन पोजिशनर्स, टूलिंग फिक्स्चर, सुरक्षा सुरक्षा बाड़ (वैकल्पिक) और अन्य भागों।
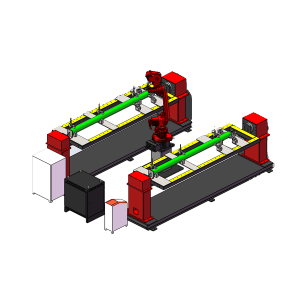
3,मिग वेल्डिंग रोबोट वर्कस्टेशन लेआउट परिचय
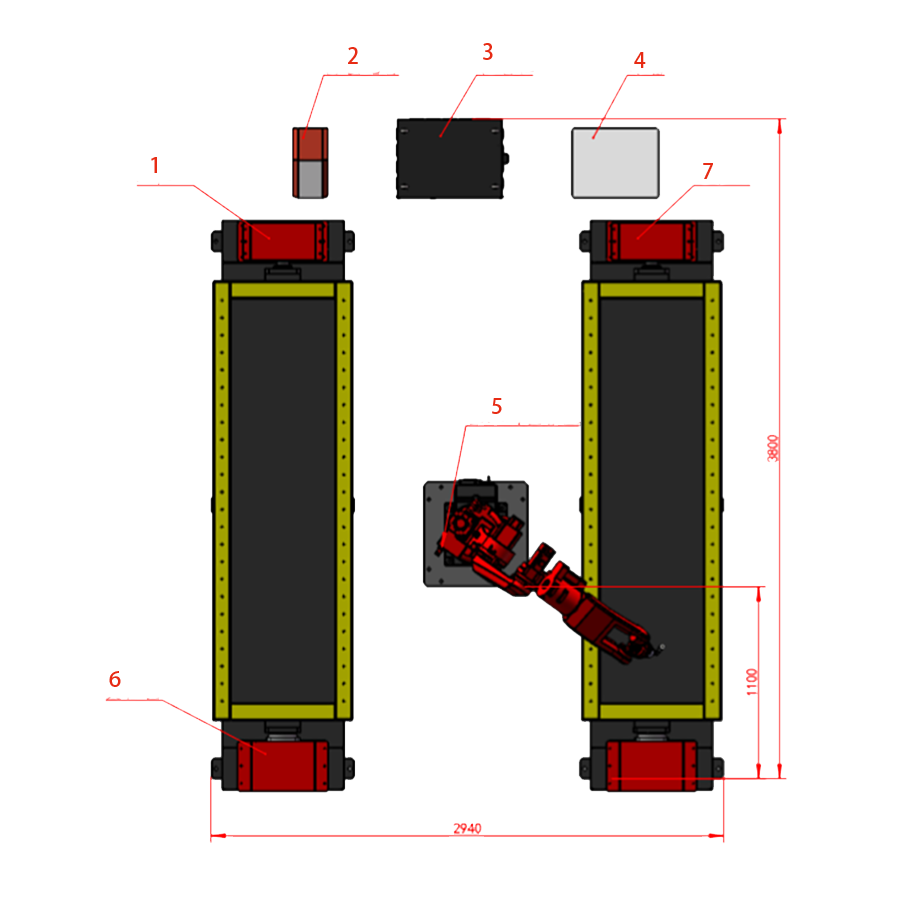
होनियन रोबोट आर्क वेल्डिंग वर्कस्टेशन लेआउट
1, वर्किंग स्टेशन 1
2, वेल्डिंग पावर स्रोत
3, रोबोट नियंत्रक
4, वाटर कूलिंग चिलर
5, होनियन आर्क वेल्डिंग रोबोट, HY1006A-145
6, पोजिशनर
7, वर्किंग स्टेशन 2
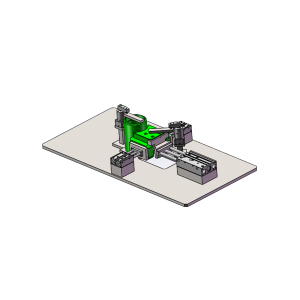
बिजली के पोल भागों जुड़नार
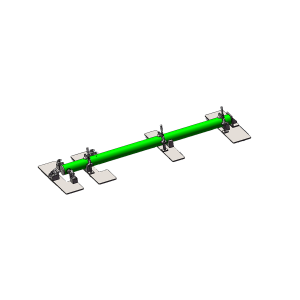
विद्युत पोल भागों जुड़नार 2
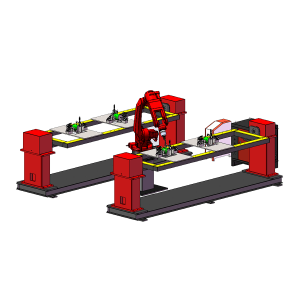
रोबोटिक वेल्डिंग समाधान लेआउट 1
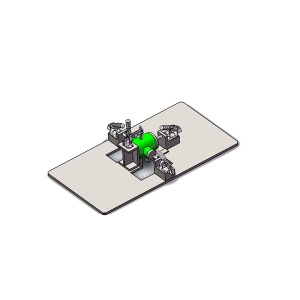
इलेक्ट्रिक पोल पार्ट्स फिक्स्चर 3
रोबोटिक वेल्डिंग समाधान लेआउट 2
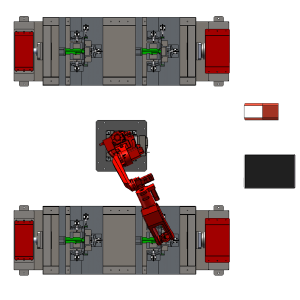
रोबोटिक वेल्डिंग समाधान लेआउट 3
4. रोबोटिक वेल्डिंग समाधान प्रक्रिया I. ऑपरेटर स्टेशन 1 पर वर्कपीस लोड करता है, इसे लोड करने और क्लैंप करने के बाद।ऑपरेटर रोबोट आरक्षण प्रारंभ बटन 1 दबाता है, और रोबोट स्वचालित वेल्डिंग शुरू करता है;
द्वितीय.वर्कपीस लोडिंग के लिए ऑपरेटर स्टेशन 2 पर जाता है।वर्कपीस लोड करने के बाद, ऑपरेटर रोबोट रिजर्वेशन स्टार्ट बटन 2 दबाता है और रोबोट फिनिशिंग वेल्डिंग की प्रतीक्षा करता है;
III.स्टेशन 1 पर रोबोट वेल्डिंग समाप्त करने के बाद, यह स्वचालित रूप से स्टेशन 2 के कार्यक्रम को पूरा करता है;
.फिर ऑपरेटर स्टेशन 1 पर वर्कपीस को उतारता है और एक नया वर्कपीस लोड करता है;
V. क्रम में चक्र।
5. रोबोटिक समाधान उपकरण विन्यास
| वस्तु | नमूना | मात्रा | ब्रैंड | टिप्पणियां | ||
| 1 | 1.1 | रोबोट बॉडी | HY1006A-145 | 1 सेट | होनेन | जिसमें रोबोट बॉडी, कंट्रोल कैबिनेट, टीचिंग प्रोग्रामर शामिल हैं |
| 1.2 | रोबोट नियंत्रण कैबिनेट | 1 सेट | ||||
| 1.3 | वेल्डिंग पावर स्रोत | 1 सेट | होनेन | मेगमीत वेल्डर | ||
| 1.4 | पानी की टंकी | 1 सेट | होनेन | |||
| 1.5 | वाटर कूलिंग वेल्डिंग मशाल | 1 सेट | होनेन | |||
| 2 | 1 एक्सिस पोजिशनर | HY4030 | 2 सेट | होनेन | 2.5m, 300kg लोड, 1.5KW रेटेड आउटपुट पावर | |
| 3 | विद्युत नियंत्रण स्टेशन | 2 सेट | होनेन | |||
| 4 | सिस्टम डिजाइन, एकीकरण और प्रोग्रामिंग | 1 सेट | होनेन | |||
| 5 | सुरक्षा घेराव | 1 सेट | होनेन | वैकल्पिक | ||
6. मुख्य कार्य वेल्डिंग की गुणवत्ता और दक्षता सुनिश्चित करने के लिए, रोबोट सिस्टम पूर्ण आत्म-सुरक्षा फ़ंक्शन और आर्क वेल्डिंग डेटाबेस से लैस है।मुख्य कार्य इस प्रकार हैं:
मूल पथ फिर से शुरू करें: जब ढाल गैस प्रवाह असामान्य होता है, वेल्डिंग के दौरान वेल्डिंग तार की खपत होती है और अस्थायी रूप से बंद हो जाती है, तो समस्या निवारण के बाद "जारी वेल्डिंग" की कमांड को सीधे कॉल किया जा सकता है, और रोबोट स्वचालित रूप से किसी भी स्थिति से निलंबित स्थिति में वेल्डिंग जारी रख सकता है।
गलती का पता लगाने और भविष्यवाणी: अलार्म होने के बाद, रोबोट कंट्रोल डिवाइस से डेटा प्राप्त करता है, फॉल्ट पार्ट्स का अनुमान लगाता है, और बदले में हाई फॉल्ट पार्ट्स की एक सूची देता है, कंप्यूटर पर कंपोनेंट्स रिप्लेसमेंट और डायग्नोसिस का क्रम प्रदर्शित करता है, जिसे टीचिंग पेंडेंट के साथ साइट पर देखा जा सकता है।इसके अलावा, कंप्यूटर नियमित रूप से रोबोट से ऑपरेशन डेटा प्राप्त करता है, प्राप्त डेटा का विश्लेषण करता है, न्याय करता है कि रोबोट की ऑपरेशन स्थिति सामान्य है, और आगामी गलती से निपटने के लिए उपयोगकर्ता को संकेत दें।
विरोधी टक्कर समारोह: जब रोबोट वेल्डिंग मशाल बाहरी वस्तुओं से टकराती है, तो रोबोट विरोधी टक्कर उपकरण वेल्डिंग मशाल और रोबोट बॉडी की सुरक्षा के लिए काम करता है।
विशेषज्ञ डेटाबेस: एक कार्यक्रम में आवश्यक वेल्डिंग की स्थिति निर्धारित करके, यह प्रणाली स्वचालित रूप से वेल्ड सीम की व्यवस्था और संबंधित वेल्डिंग मापदंडों के समायोजन को पूरा कर सकती है।
शिक्षण और प्रोग्रामिंग: शिक्षण पेंडेंट के माध्यम से साइट पर प्रोग्रामिंग का एहसास।
वेल्डिंग बुनें: वेल्डिंग प्रक्रिया के दौरान, रोबोट न केवल सामान्य स्विंग वेल्डिंग राउंड प्रकार और इसके अलावा Z प्रकार का एहसास कर सकता है।यह रोबोट को काम के टुकड़े के आकार के अनुसार ग्राहक के स्विंग वेल्डिंग फ़ंक्शन को महसूस करने में मदद करता है, ताकि वेल्डिंग की ताकत और अच्छे वेल्डिंग प्रदर्शन के साथ वेल्ड सीम की चौड़ाई बढ़ाई जा सके।
स्थिति प्रदर्शन: रोबोट शिक्षण पेंडेंट के माध्यम से पूरे रोबोट सिस्टम की संचालन स्थिति प्रदर्शित कर सकता है, जिसमें प्रोग्राम ऑपरेशन की स्थिति, वेल्डिंग प्रक्रिया पैरामीटर परिवर्तन, सिस्टम पैरामीटर परिवर्तन, रोबोट की वर्तमान स्थिति, निष्पादन इतिहास रिकॉर्ड, सुरक्षा संकेत, अलार्म रिकॉर्ड आदि शामिल हैं, ताकि ग्राहक कर सकें रोबोट सिस्टम की स्थिति को समय पर समझें और समस्याओं को पहले से ही रोकें।
इनपुट / आउटपुट फ़ाइलें: रोबोट सिस्टम में रोबोट सिस्टम फाइलें और प्रोग्राम फाइलें रोबोट नियंत्रक के अंदर एसडी कार्ड में संग्रहीत की जा सकती हैं, और बाहरी उपकरणों में भी सहेजी जा सकती हैं।ऑफलाइन प्रोग्रामिंग सॉफ्टवेयर द्वारा लिखे गए प्रोग्राम को रोबोट कंट्रोलर में भी लोड किया जा सकता है, इससे ग्राहकों को नियमित रूप से सिस्टम फाइलों का बैकअप लेने में मदद मिलती है, एक बार रोबोट सिस्टम में कोई समस्या होने पर, रोबोट की समस्याओं को हल करने के लिए इन बैकअप को बहाल किया जा सकता है।
7, उपकरणों का परिचय HY1006A-145 बुद्धिमान कार्य के साथ एक उच्च प्रदर्शन वाला रोबोट है।यह गैस परिरक्षित वेल्डिंग और काटने के अनुप्रयोगों के लिए उपयुक्त है।इसकी विशेषताएं हल्के वजन और कॉम्पैक्ट संरचना है।
चाप वेल्डिंग अनुप्रयोगों के लिए, होनेन ने सफलतापूर्वक एक हल्के वजन और कॉम्पैक्ट आर्म को डिज़ाइन किया है, जो न केवल मूल विश्वसनीयता सुनिश्चित करता है, बल्कि उत्कृष्ट लागत प्रदर्शन का भी एहसास करता है।
होयनेन सबसे उन्नत सर्वो तकनीक को अपनाता है, जो रोबोट की गति की गति और सटीकता में सुधार कर सकता है, ऑपरेटर के हस्तक्षेप को कम कर सकता है, और गैस परिरक्षित वेल्डिंग और काटने के लिए कार्य कुशलता में सुधार कर सकता है।
| एक्सिस | पेलोड | repeatability | शक्ति की क्षमता | पर्यावरण | वज़न | इंस्टालेशन |
| 6 | 10 | 0.08 | 6.5 केवीए | 0 ~ 45 ℃ 20 ~ 80% आरएच (कोई आर्द्रता नहीं) | 300 किलो | जमीन/छत |
| मोशन रेंज J1 | J2 | J3 | J4 | J5 | J6 | आईपी स्तर |
| ±170° | +80°~-150° | +95°~-72° | ±170° | +115°~-140° | ±220° | IP54 / IP65 (कलाई) |
| अधिकतम गति J1 | J2 | J3 | J4 | J5 | J6 | |
| 158°/से | 145°/से | 140°/से | 217°/से | 172°/से | 500°/से |
पूर्ण चीनी ऑपरेशन इंटरफ़ेस और पूर्ण कीबोर्ड ऑपरेशन के साथ अंग्रेजी में बदला जा सकता है
I / O इंटरफ़ेस, मोडबस, ईथरनेट आदि सहित विभिन्न संचारों का समर्थन करें।
एकाधिक रोबोट और अन्य बाहरी उपकरणों के साथ समर्थन कनेक्शन
बड़े आकार की रंगीन टच स्क्रीन
कॉन्फ़िगर किया गया टक्कर-रोधी उपकरण, रोबोट भुजा की रक्षा करता है और हस्तक्षेप को कम करता है
रोबोट मोशन कंट्रोल इष्टतम पथ योजना प्रदान करता है
सैकड़ों बिल्ट-इन फंक्शन बैग और फंक्शन प्रोग्रामिंग को आसान बनाते हैं
एसडी कार्ड के माध्यम से, डेटा का बैकअप लेना और कॉपी करना सुविधाजनक है
positioner

होनियन हेड-टेल डबल सपोर्ट पोजिशनर जिसका उपयोग वर्कपीस को घुमाने, रोबोट के साथ सहयोग करने, वेल्डिंग के लिए एक अच्छी स्थिति तक पहुंचने और अच्छा वेल्डिंग प्रदर्शन प्राप्त करने के लिए किया जाता है।
वेल्डिंग पावर स्रोत

Megmeet Ehave cm 500h / 500/350 सीरीज फुल डिजिटल इंडस्ट्रियल हैवी लोड * CO2 / MAG / MMA इंटेलिजेंट वेल्डिंग मशीन
8. स्थापना, कमीशनिंग और प्रशिक्षण
डिलीवरी से पहले, रोबोट सिस्टम को हमारी कंपनी में इकट्ठा किया जाएगा और पूरी तरह कार्यात्मक परीक्षण किया जाएगा।ग्राहक डिलीवरी से पहले परीक्षण वेल्डिंग और पूर्व-स्वीकृति के लिए हमारी कंपनी को अपने हिस्से वितरित करेंगे।पूर्व-स्वीकृति के दौरान, ग्राहक के ऑपरेटरों को प्रारंभिक तकनीकी प्रशिक्षण प्राप्त होगा।
स्थापना योजना और तकनीकी आवश्यकताओं को स्थापना से 15 दिन पहले ग्राहक को प्रस्तुत किया जाएगा, और ग्राहक आवश्यकताओं के अनुसार समय पर तैयारी करेगा।हमारी कंपनी उपयोगकर्ता की साइट पर सिस्टम इंस्टॉलेशन और कमीशनिंग करने के लिए इंजीनियरों को भेजेगी।इस शर्त के तहत कि ग्राहक पर्याप्त कमीशनिंग वर्कपीस सुनिश्चित करता है, प्रोग्रामिंग कमीशनिंग, कर्मियों के प्रशिक्षण से लेकर बड़े पैमाने पर परीक्षण उत्पादन तक का समय 10 दिनों से अधिक नहीं होगा।हमारी कंपनी ग्राहकों के लिए रोबोट सिस्टम प्रोग्रामिंग, संचालन और रखरखाव के उपयोगकर्ताओं को प्रशिक्षित करती है, और प्रशिक्षुओं को कंप्यूटर का बुनियादी ज्ञान होना चाहिए।
स्थापना और कमीशनिंग के दौरान, ग्राहक आवश्यक उपकरण प्रदान करेगा, जैसे कि उठाने के उपकरण, फोर्कलिफ्ट, केबल, प्रभाव ड्रिल, आदि, और उतराई और स्थापना के दौरान अस्थायी सहायता प्रदान करें।
हमारी कंपनी ऑपरेटर के मार्गदर्शन, स्थापना, उपकरण कमीशन और प्रशिक्षण के लिए जिम्मेदार है।हमारी कंपनी रखरखाव और संचालन प्रशिक्षण के लिए जिम्मेदार है।ऑपरेटर स्वयं उपकरणों का संचालन और रखरखाव करेगा।प्रशिक्षण सामग्री: उपकरण संरचना सिद्धांत, सामान्य विद्युत समस्या निवारण, बुनियादी प्रोग्रामिंग निर्देशों का परिचय, प्रोग्रामिंग कौशल और विशिष्ट भागों के प्रोग्रामिंग तरीके, उपकरण संचालन पैनल की शुरूआत और सावधानियां, उपकरण संचालन अभ्यास, आदि।
9. जाँच और स्वीकृति
हमारी कंपनी में दोनों पक्षों के संबंधित कार्यकर्ताओं की भागीदारी के साथ पूर्व-स्वीकृति की जाती है।पूर्व-स्वीकृति के दौरान, ग्राहक द्वारा प्रदान की गई वर्कपीस की सटीकता के अनुसार वर्कपीस का परीक्षण किया जाएगा, केवल योग्य वर्कपीस को वेल्ड किया जाएगा, और पूर्व-स्वीकृति परीक्षण रिपोर्ट जारी की जाएगी।स्वीकृति समाप्त होने के बाद, रोबोट वितरित किया जाएगा।पूर्व-स्वीकृति सुनिश्चित करने के लिए, सामान्य उत्पादन के लिए 3 वर्कपीस प्रदान किए जाएंगे।
10.पर्यावरणीय आवश्यकताएं सुरक्षा आवश्यकताएं: उपयोगकर्ताओं द्वारा उपयोग किए जाने वाले गैस और स्पेयर पार्ट्स को प्रासंगिक राष्ट्रीय मानकों का पालन करना चाहिए।
वायु स्रोत को आग से कम से कम 15 मीटर की दूरी पर, और गैस और ऑक्सीजन से कम से कम 15 मीटर की दूरी पर, बाहर स्थापित किया जाना चाहिए।वायु स्रोत अच्छी वेंटिलेशन स्थिति बनाए रखेगा और हवा से दूर ठंडी जगह पर होगा।
रोबोट का उपयोग करने से पहले सभी गैस सर्किटों की जांच की जानी चाहिए।यदि हवा का रिसाव होता है, तो यह सुनिश्चित करने के लिए मरम्मत की जानी चाहिए कि कोई गलती न हो।
दबाव को समायोजित करते समय और गैस सिलेंडर बदलते समय, ऑपरेटर के हाथों में तेल पदार्थ नहीं होने चाहिए।
परिवेश की आर्द्रता: सामान्य तौर पर, परिवेश की आर्द्रता 20% ~ 75% RH (संक्षेपण नहीं होने की स्थिति में) होती है;अल्पावधि (1 महीने के भीतर) 95% से कम आरएच (संक्षेपण के बिना अवसर)।
संपीड़ित हवा: 4.5 ~ 6.0 kgf / cm2 (0.45-0.6mpa), फ़िल्टर तेल और पानी, 100L / मिनट
नींव: न्यूनतम ठोस ताकत C25 है, और नींव की न्यूनतम मोटाई 400 मिमी . है
कंपन: कंपन स्रोत से दूर रहें
बिजली की आपूर्ति: बिजली आपूर्ति की प्राथमिक ग्राउंडिंग सुनिश्चित करने के लिए सभी निर्मित विद्युत और इलेक्ट्रॉनिक उपकरणों की बिजली आपूर्ति 50 हर्ट्ज (± 1) और 380 वी (± 10%) तीन चरण एसी वोल्टेज को गोद लेती है।
ग्राहकों द्वारा प्रदान की जाने वाली साइट पर सेवाएं:
प्रसव से पहले सभी आवश्यक तैयारी, जैसे नींव, आवश्यक वेल्डिंग कार्य, सहायक उपकरण ठीक करना आदि।
ग्राहक की साइट पर उतराई और परिवहन।
11. वारंटी और बिक्री के बाद सेवा वेल्ड पावर स्रोत की वारंटी अवधि 12 महीने है।
रोबोट बॉडी की वारंटी अवधि 18 महीने है।
सामान्य उपयोग के तहत विफलता या क्षति के मामले में और उपकरण वारंटी अवधि के भीतर है, हमारी कंपनी EXW (उपभोग्य सामग्रियों, रखरखाव उत्पादों, सुरक्षा ट्यूबों, संकेतक रोशनी और विशेष रूप से हमारी कंपनी द्वारा निर्दिष्ट अन्य उपभोग्य सामग्रियों को छोड़कर) भागों की मरम्मत या प्रतिस्थापन कर सकती है।
वारंटी के बिना कमजोर भागों के लिए, हमारी कंपनी सामान्य सेवा जीवन और कमजोर भागों की आपूर्ति मूल्य का वादा करती है, और उपकरणों में पांच साल तक उपकरणों की एक स्थिर आपूर्ति चैनल है।
वारंटी अवधि से बाहर, हमारी कंपनी आजीवन भुगतान सेवा प्रदान करना जारी रखेगी और व्यापक तकनीकी सहायता और आवश्यक उपकरण सहायक उपकरण प्रदान करेगी।
12. डिलिवरी संलग्न दस्तावेज स्थापना चित्र: उपकरण नींव निर्माण चित्र और उपकरण स्थापना चित्र
◆ डिजाइन चित्र: स्थिरता और उपकरण चित्र
मैनुअल: उपकरण संचालन मैनुअल, रखरखाव मैनुअल और रोबोट ऑपरेशन मैनुअल
◆ सहायक उपकरण: वितरण सूची, प्रमाणपत्र और वारंटी कार्ड।



